

BME
| Index | Team Members | BME490B (Spring 2026): Senior Design Project Title and Short Synopsis (<100 words) |
|---|---|---|
| Group 1: MechCell | Mechanical Conditioning Platform for Tissue Engineering | |
| Isabella Story | Image
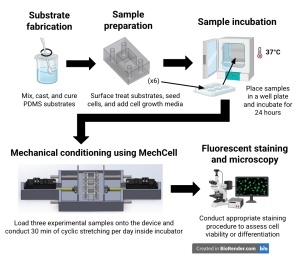
As our understanding of the cellular environment grows, researchers have made significant progress towards regenerating different tissue structures. Three-dimensional cell culture has become the gold standard in the field of tissue engineering through the use of materials such as hydrogels and Matrigel. More recently, the importance of introducing mechanical forces to samples during cell culture has been explored. The objective of this study is to develop a low cost, incubator-compatible device to deliver cyclic strain to flexible, cell laden substrates. Our team used CAD software, 3D printing, soft lithography, Arduino programming, and standard cell culturing techniques to bring this vision to life. By staining and imaging samples at the end of experiments, we hope to investigate the effect uniaxial, bidirectional stretching may have on myoblast proliferation and differentiation. | |
| Tony Hanna | ||
| Jaimie De Guzman | ||
| Montgomery Donovan | ||
| Group 2: Oxygen For All (OFA) | Eliminating Skin Tone Bias When Measuring SpO2 | |
| Jorge Orellana | Image

Pulse oximetry is a noninvasive method used to estimate arterial oxygen saturation (SpO₂) by measuring light absorption of red and infrared wavelengths through tissue. In clinical and at home settings, studies have shown that conventional pulse oximeters can exhibit reduced accuracy in individuals with darker skin tones due to differences in light absorption by melanin. This raises ethical concerns for inaccuracies and unequal device performance across diverse populations which contributes in disparities of clinical assessment. This project addresses that limitation by developing an Arduino based pulse oximeter that accounts for skin tone variability. We propose integrating Individual Typology Angle (ITA) values, a quantitative measure of skin pigmentation, into the calibration process. Correlating ITA with PPG signals, the device can adjust SpO₂ calculations to reduce bias. The system will acquire red, green and infrared signals, compute AC/DC components, and apply a modified calibration model informed by ITA. This approach aims to improve measurement equity and reliability across diverse populations while maintaining accessibility and simplicity. | |
| Arya Samimi | ||
| Gabriel Zamora | ||
| Jay Pier | ||
| Matthew Elias | ||
| Group 3: The Gaitors | Pelvic Tilt and Hip Rotation Detection Device with Haptic Feedback for Gait Correction | |
| Darin Trinh | Image
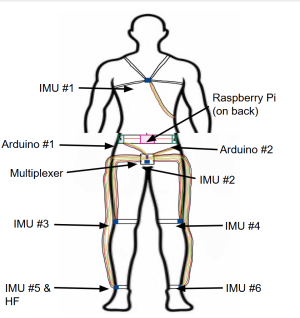
This project presents a wearable haptic feedback system designed to assist with gait correction during anterior cruciate ligament (ACL) rehabilitation. The device integrates six inertial measurement units (IMUs) to monitor pelvic tilt and hip rotation in real time. The motion data is processed using Arduino microcontrollers and a Raspberry pi to detect deviations from optimal gait patterns. When improper movement is identified, the system will deliver haptic feedback (vibrations) to guide the user towards corrective adjustments. This approach enables continuous, non-invasive monitoring outside of clinical settings, promoting a more effective rehabilitation and reducing the risk of reinjury. | |
| Sara Mendoza | ||
| Dannah Javier | ||
| Lukas Foster | ||
| Maro Aziz | ||
| Group 4: F.A.V.O.R. | Development of the Fluidic Automation for Versatile Output in Research (F.A.V.O.R.) Device | |
| Luis Cobarruvias | Image
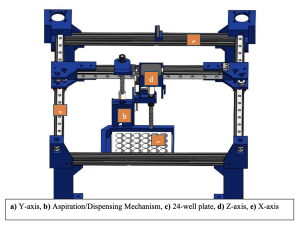
Accurate, repetitive handling of fluid reagents and samples is a cornerstone of wet laboratory work. Traditionally, fluid-handling procedures and assays are manually performed through pipetting. However, manual operation is time consuming for researchers, and issues such as cross-contamination, inconsistent volumes pipetted, physical fatigue, and other human errors may arise. Liquid-handling robots have thus emerged as tools for automating these processes. However, these robots are expensive and large, making them ill-suited for small laboratories. The aims to combat these issues by developing an automatic liquid handling robot capable of performing assays while remaining small enough to fit into an incubator. | |
| Steven Harris | ||
| Cameron Toland | ||
| Amaris Guevara | ||
| Siddhi Ahir | ||
| Group 5: The Helping Hand | A Low-cost Servo-actuated Exoskeleton Glove for Post-stroke Survivors | |
| Anthony Guirgis | Our capstone project is a therapy glove designed for stroke patients with hand mobility difficulties. The device assists in rehabilitation by guiding the hand through cyclic opening and closing motions using a system of servo motors and mechanical linkages. Finger extension is actively driven by the servo system, while an elastic material integrated into the glove enables the passive closing of the fist. The underlying hypothesis of this work is that repeated, controlled hand exercise- more specifically cyclic opening and closing- can improve motor control, strength, and overall hand function in individuals recovering from stroke. By automating this motion, the glove enables consistent and repeatable therapy without the need for continuous manual assistance. The device is lightweight and wearable, making it suitable for regular rehabilitation sessions, and represents a practical, cost-effective approach to supporting hand recovery. | |
| James Guerena | ||
| Mariana Dantas | ||
| Yesenia Rodriguez | ||
| Megan Carmody | ||
