

MAE 479
| Index | Team Members | Senior Design Project Title and Short Synopsis (<100 words) |
|---|---|---|
| MAE 479 - Praveen Shankar's Class | ||
| Group 1: | Single-Stage-to-Orbit Launch Vehicle | |
Image
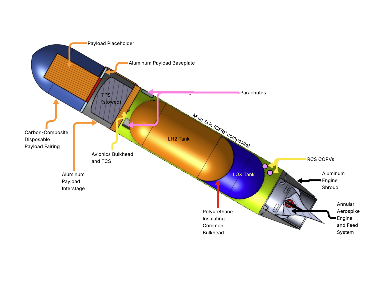
| This project addresses the development of a reusable vehicle to provide rideshare service to LEO for payloads up to 1000kg, and to reduce the per-kilo launch cost below $7,500. The launch vehicle is single-stage-to-orbit conventional rocket utilizing an annular aerospike engine, LH2/LOX propellant, full flow-staged combustion, light inflatable heat shield, composite-majority structure, and separating nose fairing. | |
| Group 2: | Plasma Shepherd | |
Image
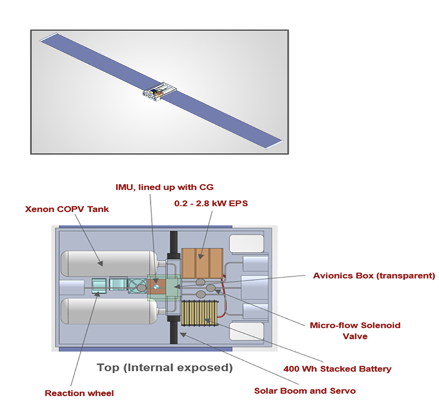
| The Plasma Shepherd is a small spacecraft designed to remove orbital debris using a contactless plasma propulsion system. The spacecraft uses a bi-directional plasma thruster to transfer momentum to debris while maintaining a safe standoff distance of approximately 5 meters. The system integrates guidance, navigation, and control (GNC) technologies including reaction wheels, star trackers, IMU, GNSS, and LiDAR to ensure precise pointing and relative navigation. The spacecraft generates up to 600 W of power and maintains accurate thruster alignment within 0.5°. Simulation and analytical verification demonstrate that the system meets mission requirements for debris removal in low Earth orbit. | |
| Group 3: | Inter Orbital Navigator | |
Image
| The Inter-Orbital Navigator (ION) is a rechargeable, battery-powered spacecraft designed to operate entirely within Low Earth Orbit (LEO). Unlike conventional vehicles that return to Earth between missions, ION remains in orbit to provide efficient, on-demand transport of passengers and cargo between space stations. By eliminating costly and time-consuming atmospheric re-entry and re-launch cycles, ION offers a sustainable solution for the growing need for intra-orbital mobility as humanity expands its presence in space. | |
| MAE 479 - Cody Karcher, Jingyi Zeng (ESRA), Tairan Liu (SharkSat) | ||
| Group 1: | F.I.R.E. Drone (Fixed-wing, Interconnected, Resupply, Emergency Drone) | |
Image
| Most California wildfires are located in a region that does not allow for easy, safe access to supply crews on the ground due to terrain. Limited road access and sharp elevation changes coupled with dense vegetation prevent fire crews from carrying the necessary equipment, hindering their ability to cut fire lines and establish fire breaks. While containing wildfires, the ground crew’s requests are often time- sensitive and require immediate resupply. The typical turn-around time to deliver the water, tools, or medical supplies needed can take hours, compromising the crew’s safety and effectiveness in the field. These deliveries can be supplied by helicopter, however, helicopters are usually prioritized for water and retardant drops or medevac use. They are also costly per hour, which adds up over the course of a multi- week wildfire. Naturally, fire crews are faced with the question: how will they supply their ground crews in a timely manner without taking away from other firefighting resources? Our team proposes F.I.R.E. Drone, a fixed-wing, interconnected, resupply, emergency drone that will allow for a fast, on demand, low-risk resupply, where an on-ground crew can request critical equipment. Designed as a vertical take- off and landing UAV with a hybrid-electric powertrain, this drone can operate autonomously or manually, covering a range of around 120 miles with an approximate endurance of 2.5 hours. The drone operates by precisely delivering necessary equipment to the crew’s remote location via parachutes within minutes, without endangering more lives with a helicopter crew or a ground transport team. | |
| Group 2: | Callisto-1 Icy Moon Lander | |
Image

| The Callisto-1 Lander is a spacecraft designed to assist in determining the habitability of Callisto. The growing commercialization of space is the first steppingstone to humanity’s eventual colonization of the solar system. It is imperative to find suitable hosts for habitation, and Callisto is a primary target. One of the primary requirements for life is the presence of water. Callisto’s surface is icy and rocky and contains an ocean under its surface layer. Using topological data from the ESA’s JUICE mission and NASA’s Europa Clipper mission, a landing site will be determined. The lander will transfer from Earth to Callisto, where it will land and collect samples of the surface. It will analyze the samples to enable the identification of the chemical, geological, and biological composition of Callisto. | |
| Group 3: | AURORA NOVA-1 (AN-1): Supersonic Air-assisted Launch System | |
Image
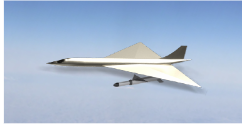
| The AN-1 system was developed in response to the growing gap between the increasing demand for access to Low Earth Orbit and the limited capacity, flexibility, and responsiveness of existing launch services. As satellite constellations, research missions, and government space operations continue to expand, current launch options have become increasingly restrictive, especially for small to medium sized payloads that are often forced into rideshare missions with fixed schedules and limited orbital flexibility. To address this need, the AN-1 system was designed as a supersonic air-assisted launch system that provides a more flexible, efficient, and responsive approach to payload delivery. The system consists of two integrated vehicles: the AURORA-1 supersonic carrier aircraft and the NOVA-4 two-stage launch vehicle. By carrying the launch vehicle to approximately Mach 3 at 70,000 feet prior to release, the carrier aircraft reduces the atmospheric drag and gravity losses typically encountered during the early stages of ascent while also providing the rocket with an initial energy advantage. As a result, the AN-1 system offers improved mission efficiency, greater launch responsiveness, and increased operational flexibility compared to conventional ground-based launch systems. Overall, the concept was developed to provide a more dedicated and adaptable path to space while emphasizing reusability, system integration, and mission practicality. | |
| Group 4: | A.Q.U.A – Amphibious Quick-Deploy Uncrewed Aircraft | |
Image
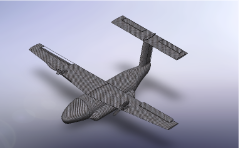
| This project addresses the development of a reusable vehicle to provide rideshare service to LEO for payloads up to 1000kg, and to reduce the per-kilo launch cost below $7,500. The launch vehicle is single-stage-to-orbit conventional rocket utilizing an annular aerospike engine, LH2/LOX propellant, full flow-staged combustion, light inflatable heat shield, composite-majority structure, and separating nose fairing. | |
| Group 5: | WASPNET | |
Image
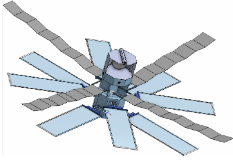
| For this project, our overall goal is to demonstrate the concept of Space Based Solar Power (SBSP). To do so, our satellite is inserted into a near rectilinear halo orbit around the Moon. Once inserted WASPNET (Wirelessly and Autonomously Sending Power to Near Earth Targets) will begin transmitting power to the Moon to prove the viability of the fundamental technologies of long‑distance wireless power transfer in a context where they offer clear advantages over competing solutions. Additionally, WASPNET’s power beaming capabilities will prove useful for current/future space missions (e.g. Artemis II, STARSHIP, etc.). This mission serves as a full‑scale testbed to validate the core subsystems and architectural choices needed for future space power infrastructure, establishing a realistic, near‑term pathway for SBSP deployment where its benefits can outweigh its costs. | |
| Group 6: | Optical Lunar Communications Constellation (OLCC) | |
Image
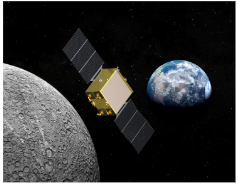
| The Optical Lunar Communication Constellation (OLCC) will provide infrastructure around the Moon to enable high bandwidth and consistent communication between any point on the lunar surface, orbiting satellites, and ground stations on Earth. It will consist of two groups of three satellites each, spread in halo orbits at the L1 and L2 points of the Earth-Moon system with orbital periods of approximately fourteen hours. Each satellite will be capable of utilizing free- space optics (FSO) communication systems to establish links with nearby satellites in the same orbit, as well as the utilization of optical communications with other points of interest on the Earth or Moon. With the increase of lunar missions and particularly, NASA’s push towards the ARTEMIS program, the primary goals of this mission will be to provide communication services around the Moon and between the Moon and Earth with high data rates, courtesy of primary dependence on optical systems, and capabilities to support exponential growth in lunar unmanned and manned missions in the new space race. The dependence on optical communication systems is primarily due to their capability of meeting the data rates demanded by a relay system that can support evolving scientific payloads and manned missions to the lunar surface, something that cannot be as efficiently supported by legacy radio frequency communications systems at such distances. | |
